快捷导航
快捷导航
1、本站下载好压缩文件解压后,你会在文件夹内看到 bin、include、model 等文件夹。
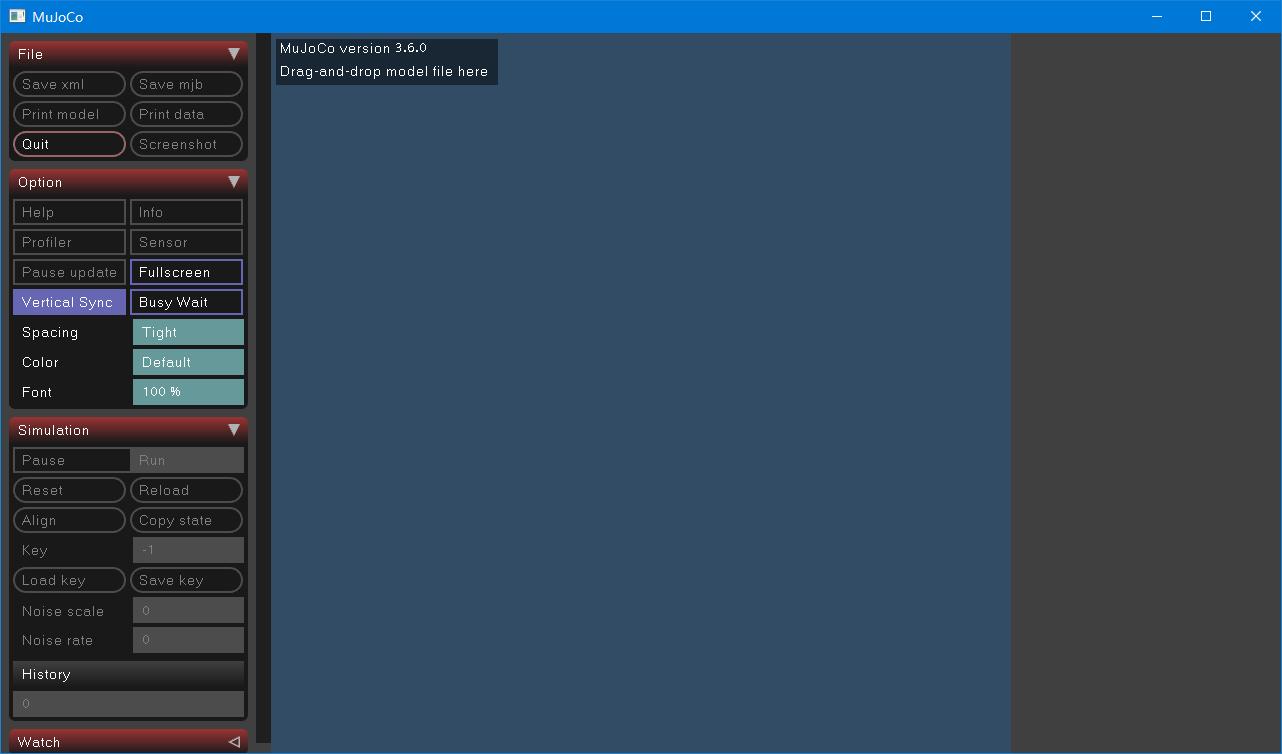
2、进入 bin 目录。
3、双击运行 simulate.exe(这是 MuJoCo 自带的可视化仿真器)。
4、你可以直接将 model 文件夹里的任何 .xml 文件(如 humanoid.xml)拖入 simulate.exe 的窗口中。
5、如果你能看到一个机器人模型并能用鼠标拖动它,说明软件已正常运行了
软件信息
相关推荐
更多版本
SPSS破解免费版590M行业软件v28.0.1最新版本
查看
斯沃数控仿真软件破解版381M行业软件v7.3.6.3最新版
查看
GraphPad Prism 10300.02MB行业软件v10.4.0.621电脑版
查看
大疆模拟器(DJI Flight Simulator)79.49M行业软件官方电脑版V2.2.0
查看
三菱plc编程软件(gx works2)500M行业软件v2024最新版
查看
管家婆辉煌版破解版167.89M行业软件V13.0单机破解版
查看
今日制造离线安装包366.99M行业软件
查看
装箱大师中文破解版53MB行业软件v5.8.6
查看
翰文进度计划破解版9.72MB行业软件V25.1.15破解版
查看
BarTender 2016破解版238MB行业软件最新版
查看